CM3 Speed/Thermal OS Configuration Options
The CM3 comes with the same SoC as used in the Raspberry Pi 3, this features a quad core 1.2GHz ARM Cortex-A53 CPU
The default operation of the OS is to apply dynamic clock frequency rates from 600MHz to a max of 1.2GHz as required by the OS, this means the SoC will get substantially hotter than the one used on the CM1. There's much debate as to the usefulness of applying passive heatsinks to the CPU and whether the average install will need active cooling or not, especially as the CPU is tested to run at high temperatures. As such we would advise customers evauate whether active/passive cooling is applicable for thier application.
There are a number of OS configuration options to control the CPU operating frequency and CPU speed throttle back temperature limits, as well as the option to limit the number of active cores, these all play a factor in the amount of heat SoC dissipates.
in /boot/config.txt you can can control the below parameters :
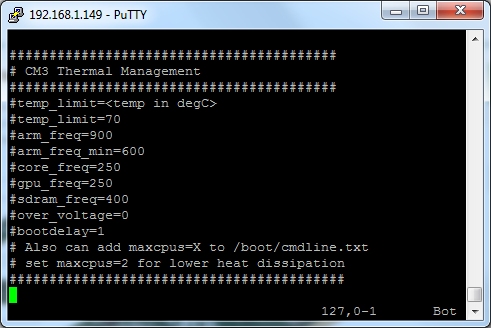
arm_freq Frequency of ARM in MHz
core_freq Frequency of GPU processor core in MHz. Default 250
sdram_freq Frequency of SDRAM in MHz. Default 400
force_turbo Disables dynamic cpufreq driver and minimum settings below. Default 0
initial_turbo Enables turbo mode from boot for the given value in seconds (up to 60)
or until cpufreq sets a frequency. Default 0
arm_freq_min Minimum value of arm_freq used for dynamic clocking. Default 600
core_freq_min Minimum value of core_freq used for dynamic clocking. Default 250
sdram_freq_min Minimum value of sdram_freq used for dynamic clocking. Default 400
temp_limit Throttles back SoC frequencies and voltages when SoC reaches this Celsius value
Default 85
boot_delay Wait for x number of seconds in start.elf before loading kernel. Default 1
over_voltage ARM/GPU core voltage adjust. Default is 0 (1.2 V)
The Number of active cores can also be configured by adding max_cpus=(1-4) to the end of /boot/cmdline.txt :
dwc_otg.lpm_enable=0 console=serial1,115200 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait maxcpus=4
For more information see the page below :